
Specifying goals to deep neural networks with answer set programming
Published in International Conference on Automated Planning and Scheduling (ICAPS), 2024
This paper shows how logical goal specifications can condition a learned heuristic so one trained DNN can solve many goal variants without retraining.
Why it matters
- DNN-based heuristics for planning typically assume a fixed, pre-defined goal.
- Changing the goal often requires retraining or enumerating all acceptable goal states.
- Many real problems require specifying properties of a goal rather than a single exact state.
- There is no formal mechanism to express logical goal constraints directly to a trained DNN.
- In domains with many valid target states (for example, Rubik's cube patterns), enumerating all goals is computationally burdensome.
What we did
- Introduced a goal-conditioned DQN,
Q(s, a, G), that estimates cost-to-go for a set of goal states. - Represented goals as sets of ground atoms in first-order logic.
- Used Answer Set Programming (ASP) to generate stable models that define goal specifications.
- Trained with random walks (100-200 moves for Rubik's cube starts) and subsampled logical goal atoms.
- Combined the learned heuristic with weighted batched Q* search (batch size 10,000; weight 0.6).
- Demonstrated diverse Rubik's cube and Sokoban goals without retraining the DNN.
- Showed broader goal specifications can reduce solve time (for example, Cross6: 218.45 s vs canonical: 625.62 s).
How it works
- Goal-conditioned Q-learning: learn
Q(s, a, G)whereGis a set of ground atoms. - Goal generation: convert a state to logical atoms and remove subsets to create generalized goals.
- ASP specification: use stable models from an ASP program to represent goal sets.
- Model refinement: if a stable model is not a valid goal model, iteratively expand it.
- Search: use batched weighted Q* search to reach states satisfying the logical goal.
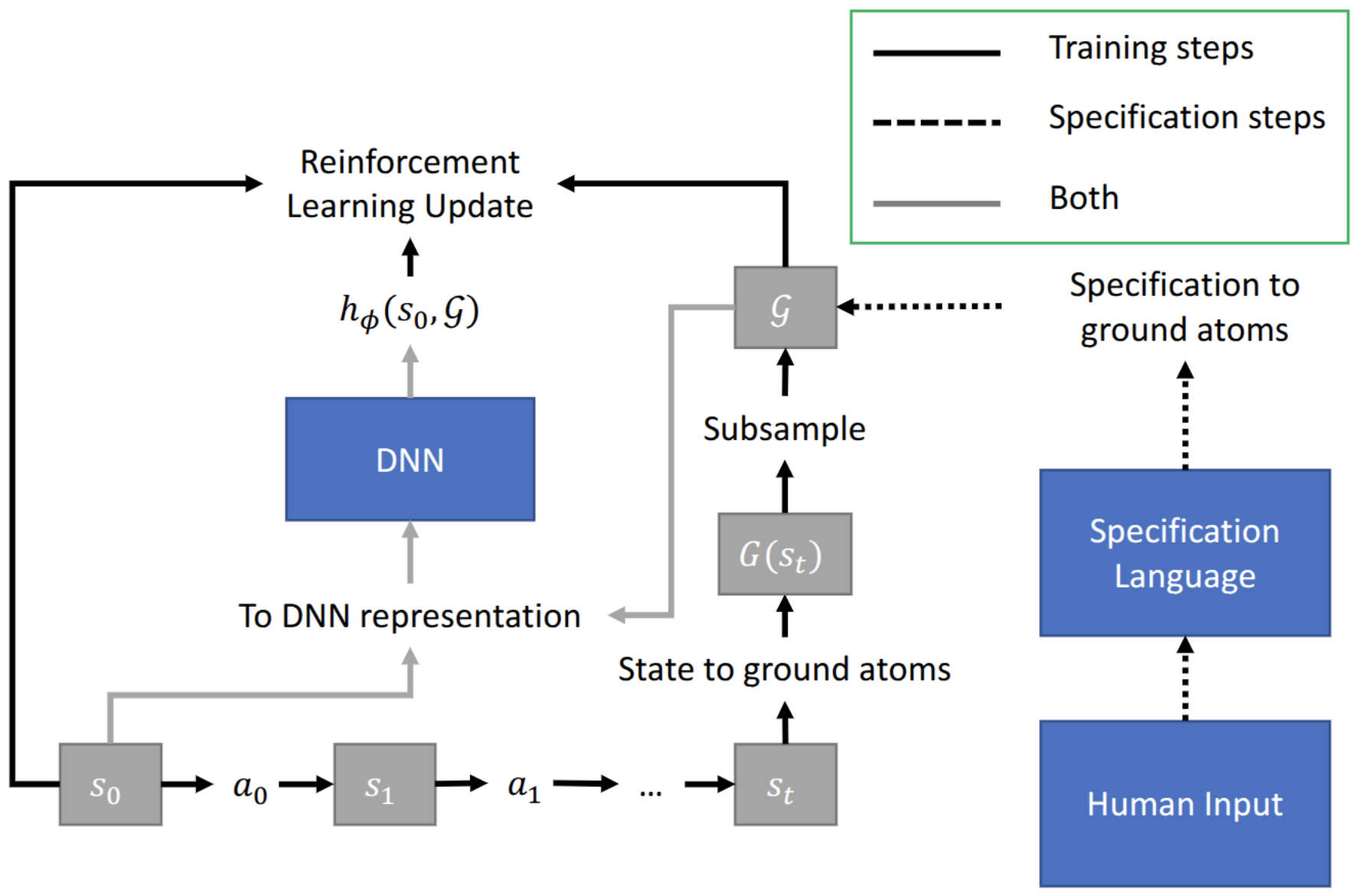
Figure 1 illustrates how logical specifications are converted into ground atoms and passed into the DQN.
Key contributions
- Formalizes goal specification to DNN heuristics using first-order logic and ASP.
- Introduces a training procedure that generalizes across unseen goals without retraining.
- Demonstrates diverse Rubik's cube goals (for example, Cross6, CupSpot, Checkers) and Sokoban goals.
- Empirically shows that broader goal sets can reduce solve time and path cost (for example, Cross6 vs canonical).
Recommended citation: Forest Agostinelli, Rojina Panta, and Vedant Khandelwal. (2024). "Specifying goals to deep neural networks with answer set programming." Proceedings of the ICAPS, vol. 34, pp. 2-10.
Download Paper