
NeuroSymbolic Knowledge-Grounded Planning and Reasoning in Artificial Intelligence Systems
Published in IEEE Intelligent Systems, 2025
This paper presents a layered neurosymbolic approach that couples language models with symbolic reasoning and knowledge graphs to produce interpretable, constraint-aware plans.
Why it matters
- Decision-support systems in domains such as health care require multistep reasoning, constraint enforcement, and regulatory compliance.
- LLMs generate coherent language but struggle with structured search, logical verification, and protocol adherence.
- Implicit knowledge representations prevent explicit state tracking, rule enforcement, and safety validation.
- High-stakes environments require interpretable, constraint-aware, and dynamically adaptable planning, which standalone LLMs do not guarantee.
What we did
- Proposed a neurosymbolic framework integrating domain-adapted LLMs with knowledge graphs (KGs), symbolic reasoning, and constraint-aware planning.
- Used the LLM to generate initial candidate plans in natural language aligned to domain context.
- Transformed LLM outputs into structured representations compatible with KG-backed reasoning modules.
- Applied deductive reasoning for logical consistency and abductive reasoning to resolve incomplete or conflicting constraints.
- Illustrated the approach through a health-care MTSS use case involving a 16-year-old student subject to protocol and budget constraints.
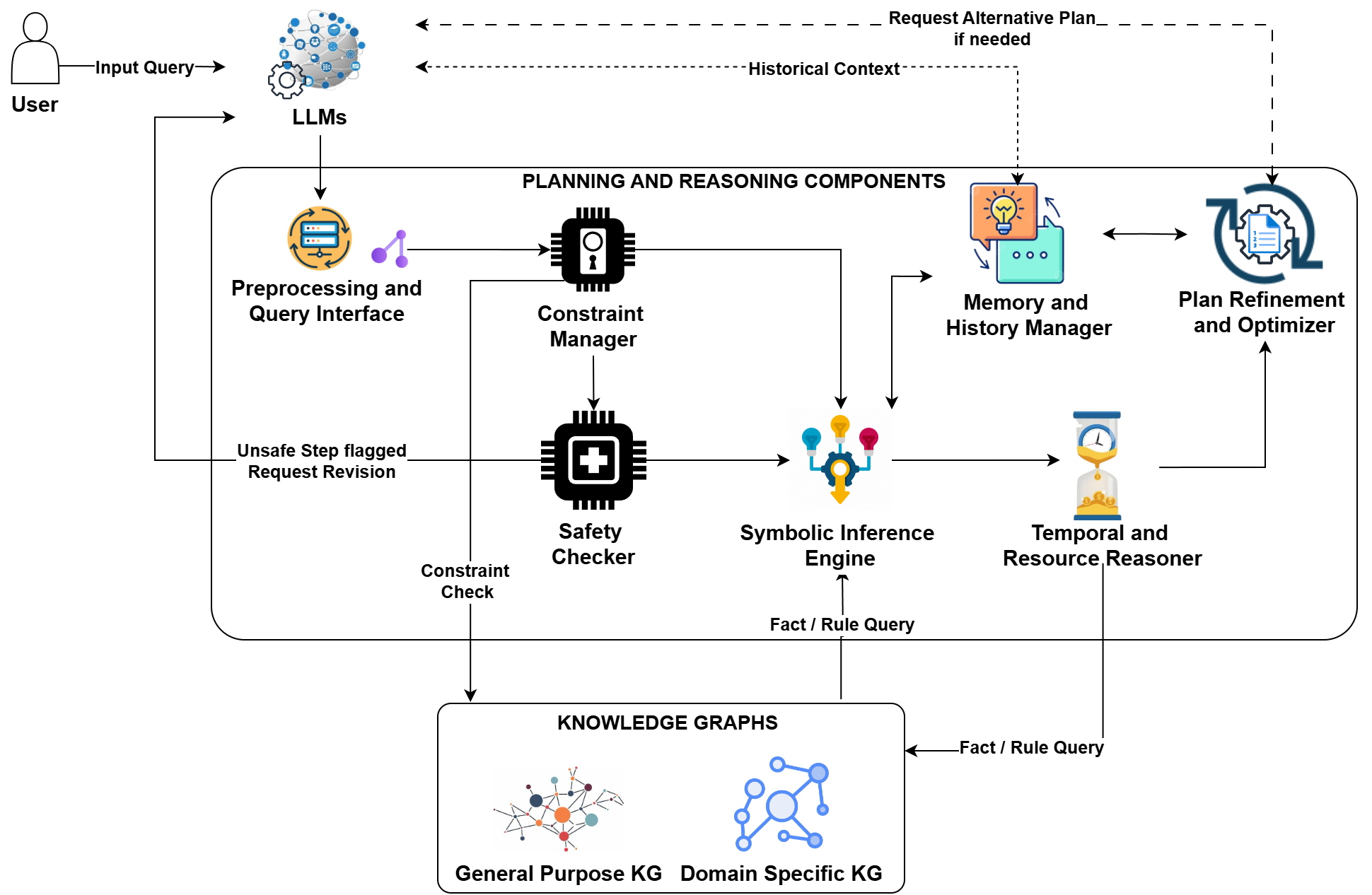
Figure 1 shows how the LLM, symbolic modules, and knowledge graphs interact across grounding, reasoning, and planning layers.
How it works
- Domain-adapted LLM interprets user queries and generates candidate plans in natural language.
- Preprocessing interface converts textual outputs into structured actions and conditions aligned with KG entities.
- Constraint manager and safety checker validate compliance with domain rules and flag violations.
- Symbolic inference engine applies deductive reasoning for verification and abductive reasoning for resolving gaps.
- Temporal and resource reasoner + optimizer ensure feasibility and iteratively refine plans using past history.
Key contributions
- Introduces a layered neurosymbolic architecture organized around knowledge grounding, reasoning integration, and dynamic planning.
- Formalizes the integration of LLM-generated plans with KG-backed constraint checking and logical verification.
- Demonstrates deductive and abductive reasoning over structured domain knowledge to resolve conflicts (for example, protocol versus budget).
- Illustrates an iterative feedback loop between LLM and symbolic modules to ensure policy-compliant, executable plans.
Recommended citation: Amit Sheth, Vedant Khandelwal, Kaushik Roy, Vishal Pallagani, and Megha Chakraborty. (2025). "NeuroSymbolic Knowledge-Grounded Planning and Reasoning in Artificial Intelligence Systems." IEEE Intelligent Systems, pp. 27-34.
Download Paper